搜索关键词:
产品名称,产品种类,型号,
测试标准或规范,生产商,技术种类,应用等等




工业机器人机械环境倾斜和摇摆可靠性试验机
返回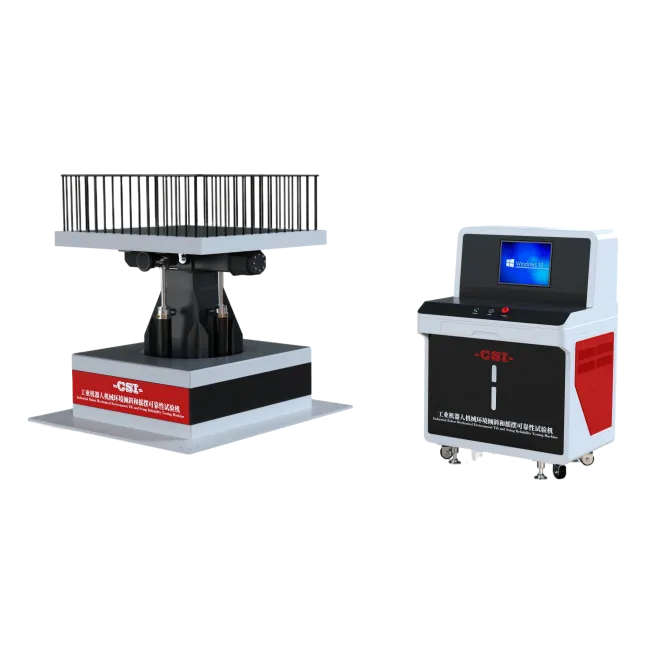
分享到
一、仪器介绍
工业机器人机械环境倾斜和摇摆可靠性试验机是专门用于模拟工业机器人在倾斜、摇摆工况下运行状态的测试设备,核心用于验证产品的环境适应性与结构可靠性,符合GB/T 39266-2020等相关测试标准。
二、满足标准
GB/T 39266-2020 工业机器人机械环境可靠性要求和测试方法 5.5倾斜和摇摆试验。
三、技术参数
参数项 | 规格 |
控制系统 | PLC+Windows系统 |
操作界面 | 彩色10寸嵌入式工业电脑 |
测试项目 | 纵倾、横倾、纵摇、横摇 |
角度传感器 | 量程0-360° 精度:±0.1° |
倾斜试验 | |
纵倾 | 角度:5°或10° 试验持续时间:前后各不小于15min |
横倾 | 角度:15°或22.5° 试验持续时间:左右各不小于15min |
摇摆试验 | |
纵摇 | 角度:10° 试验持续时间:≥30min |
横摇 | 角度:22.5° 试验持续时间:≥30min |
周期 | 10s |
报告输出 | 自动生成测试报告,支持PDF、Excel格式导出,WiFi连接打印机打印 |
安全装置 | 急停按钮,过载防护 |
电源 | AC220V±10% 50Hz |
四、试验条件与方法
1.安装与状态要求
对于在船舶上使用的工业机器人:需严格按照实际使用时的安装方位和方式,直接或通过专用安装架安装在试验台台面上,试验过程中机器人应处于通电待机空载状态,模拟实际使用中待机时的工况,考核机器人在倾斜摇摆环境下,其电气系统、待机功能的稳定性。
对于通过船舶运输的工业机器人:需严格按照实际运输时的固定方位和方式,直接或通过专用安装架安装在试验台台面上,试验过程中机器人应处于不带电状态,模拟运输过程中机器人的状态,考核机器人在运输倾斜摇摆环境下,其结构的完好性和抗运输损伤能力。
当有多种安装方式时,应优先选取可能承受ZUI严酷条件作用的那种方式进行试验,若无法确定,则应对所有安装方式进行试验,确保QUAN面验证机器人在不同安装场景下的适应性。
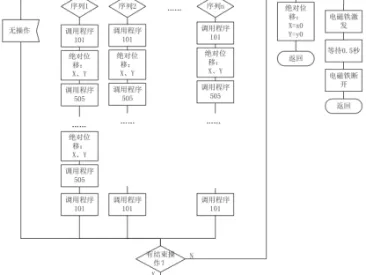
2.试验顺序
除另有规定外,试验需按照先倾斜后摇摆,先纵向后横向的顺序进行。先进行倾斜试验,再进行摇摆试验,是因为倾斜是相对静态的工况,摇摆是动态的工况,先静态后动态的顺序更符合实际船舶从静止到航行的状态变化;先纵向后横向,是因为船舶在航行中通常是先产生前后倾斜和纵摇,再产生左右倾斜和横摇,该顺序更贴合实际航行的工况变化。
五、试验后检测要求
试验结束后,被测工业机器人需有一段恢复时间,使其回到与初始检测相同的条件,之后要通过外观检查和功能性能检测。外观检查主要查看机器人是否有结构变形、部件松动、外壳破损、线缆脱落等可见的损伤;功能性能检测则需按照机器人的出厂标准,对其各项功能,如运动精度、电气控制、传感器数据采集等进行QUAN面检测,确保机器人在经过倾斜摇摆试验后,仍能保持正常的工作性能。
六、产品研发与质量管控场景
研发阶段可靠性摸底:在工业机器人研发阶段,针对船舶、海上作业等特殊场景的机型,通过该试验机的倾斜摇摆试验,提前暴露产品在动态环境下的结构与功能缺陷,优化产品设计,提升产品环境适应性。
量产前批量验证:在产品量产前,对样机进行批量倾斜摇摆试验,验证产品一致性,确保批量生产的产品都能满足特殊场景的可靠性要求。
服役后性能复测:对已在船舶等特殊场景服役的工业机器人,定期通过该试验机进行性能复测,评估其长期使用后的结构老化、功能衰减情况,为设备维护与更换提供依据。
七、基本配置
主机一台
扳手1套
电源线1根
说明书1份
合格证1份
保修卡1份
铭牌1份