搜索关键词:
产品名称,产品种类,型号,
测试标准或规范,生产商,技术种类,应用等等




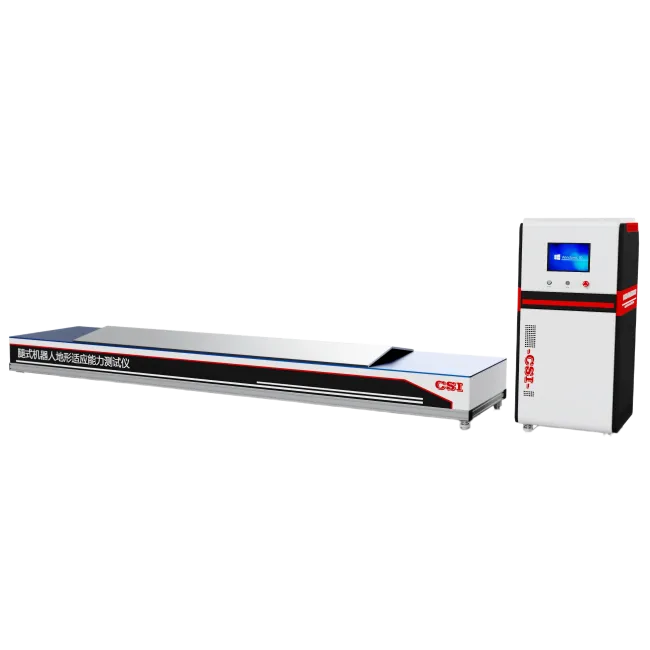
机器人运动耐用性测试仪
返回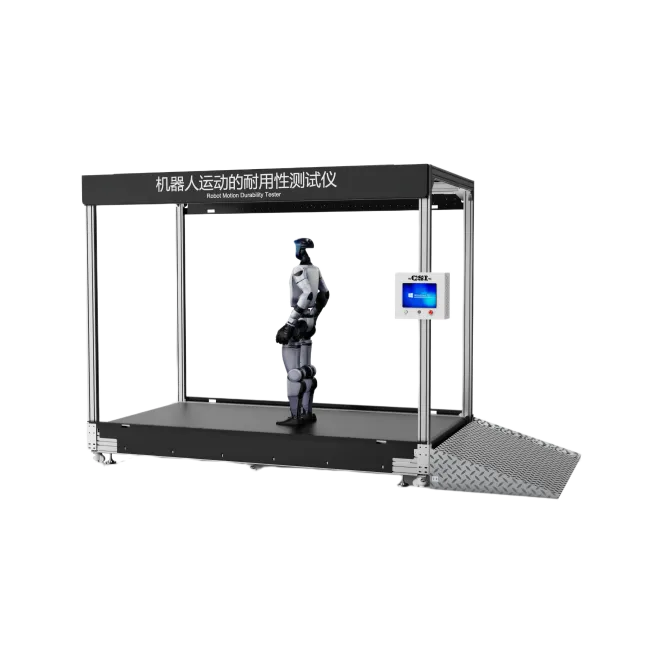
分享到
一、仪器介绍
依据标准耐久试验工况,模拟机器人长期往复直线、转弯、原地转向、变轨迹连续行走;自动模拟额定负载、标准行走地面,全程采集里程、循环次数、电机电流、关节温升、行走偏移、卡顿故障;耐久后复测行走精度、续航、驱动性能,判定行走轮、减速器、电池、底盘结构长期运动疲劳失效,用于研发耐久验证、成品出厂抽检、第三方型式预检测。
二、满足标准
GB/Z 43202.1-2024《机器人 GB/T 36530 的应用 第 1 部分:安全相关试验方法》第 9.2 节 移动机器人运动的耐用性试验。
三、技术参数
参数项 | 规格 |
控制系统 | PLC+windows |
操作界面 | 彩色10寸触摸屏,中英文切换 |
标准行走台面尺寸 | 总长 12000mm,有效试验宽度 2200mm,支持长距离连续往复耐久 |
侧边限位防护栏 | 高度 150mm,可调间距,防止机器人试验中冲出轨迹 |
路面模拟模块 | 标配标准平坦测试行走面,摩擦系数摩擦系数 0.6~0.8 |
负载加载范围 | 0~100kg 分级配重加载 |
加载方式 | 块化标准砝码,均匀分布于机器人重XIN区域,不改变机器人原始重XIN高度 |
速度调节范围 | 0.1~1.5m/s 可调 |
循环计数上限 | 0~9999999 次 |
单次连续运行时长 | 0~9999h 可设置 |
安全装置 | 急停按钮,过载防护 |
电源 | AC220V±10% 50Hz |
四、操作步骤
a)将机器人放置在测试行走面上。如果机器人能够运载乘客或由用户穿戴,则测试用假人与机器人一起进行测试。
b)机器人以制造商规定的速度在测试行走面上移动一段时间或一段距离(制造商限制的)。外部电源能够用作动力。
c)记录可见的损坏,例如破裂、变形、摆动、部件松动或脱离以及机器人功能的变化。
五、基本配置
主机1台
扳手1套
电源线1根
说明书1份
合格证1份
保修卡1份
铭牌1份